定向和方向的区别
- 方向可以使用两个参数表示 (极坐标);
- 定向需要三个参数 (欧拉角);
矩阵形式
矩阵的选择
矩阵的选择
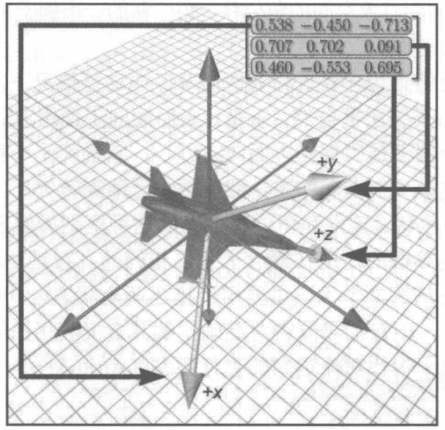
- 使用直立空间坐标的表示的对象空间的正交基构成的 3 * 3 矩阵表示;
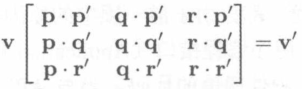
对象空间坐标和直立空间坐标的转换
- 假设对象空间坐标,直立空间坐标,旋转矩阵依次为 o,u,m;
u=o⋅m
o=u⋅m−1
方向余弦矩阵
方向余弦矩阵和旋转矩阵的关系
- 两者相同;
- 方向余弦矩阵只是一种解释旋转矩阵的方式;
旋转矩阵的元素值
- 旋转矩阵元素值为当前空间对应轴与目标空间对应轴的点积;
- 若两个空间的基向量都为标准正交基;
- 故旋转矩阵元素值为两个空间对应基向量的夹角;

矩阵形式的优缺点
矩阵形式的优点
- 可以直接在对象空间和直立空间之间转换;
- 可以嵌套多个坐标之间的转化关系;
- 可以通过矩阵求逆反向计算;
矩阵形式的缺点
欧拉角
欧拉角约定
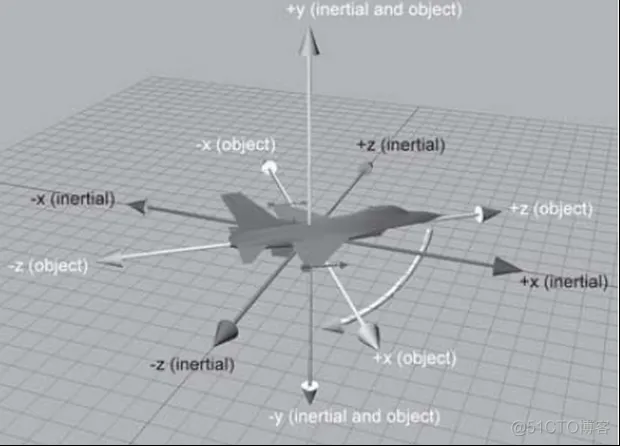
欧拉角
- 围绕对象空间 3 个垂直轴的三个夹角;
- 首先将对象空间和直立空间的轴对齐;
- 依次为航向角 (方位角),俯仰角和翻滚角,即 +y,+x,+z 的夹角;
- 使用左手坐标系:+x 向右,+y 向上,+z 向前;
- 正方向使用左手旋转;
- 航向角 - 俯仰角 - 翻滚角;
- Yaw-Pitch-Roll;
- Heading-Pitch-Bank;
固定轴
固定轴
旋转顺序
- 依次为翻滚角,俯仰角和航向角 (方位角),即 +z,+x,+y 的夹角;
- 旋转顺序和欧拉角相反;
- 固定轴称其为外旋;
- 欧拉角称其为内旋;
欧拉角的优缺点
欧拉角的优点
- 易于人类使用;
- 数据容易压缩;
- 任意一组 3 个数字都有效;
欧拉角的缺点
- 定向的表示不是唯一的;
- 角度可以任意添加 2pi;
- 通过调整旋转顺序和旋转轴,可以得到不同的表示方法:万向节死锁;
- 两个定向之间的插值由于定向的表示不唯一,具有问题;
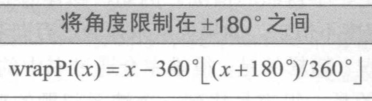
欧拉角的规范化
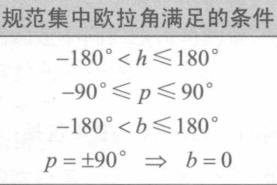
定向插值的优化公式
- 一定使用规范化的欧拉角;
- 限制旋转角度在 180 度;
轴-角和指数映射
欧拉旋转定理
- 任意两个定向 r1,r2;
- 都存在唯一的轴 n;
- 使得围绕 n 旋转一次即可从 r1 到 r2;
轴-角
- 设旋转角 θ 和过原点的旋转轴,该轴平行于单位向量 n^;
指数映射
- e=θn^ 为使用指数映射描述轴-角形式的角位移;
- θ=∣∣e∣∣;
四元数
四元数表示法
四元数表示法
- 标量分量 + 向量分量;
- [w,(x,y,z)];
- [w,v];
q=[wv]=[cos(2θ)sin(2θ)n^]
q=[w(x,y,z)]=[cos(2θ)sin(2θ)nxsin(2θ)nysin(2θ)nz]
四元数变负
四元数变负
- -[w,(x,y,z)] = [-w,(-x,-y,-z)] = -[w,v] = [-w,-v];
- 四元数变负表示相同的角位移;
单位四元数
单位四元数
四元数的大小
四元数的大小
∣∣q∣∣=ω2+x2+y2+z2
四元数的共轭和逆
四元数的共轭
q∗=[w−v]=[w(−x,−y,−z)]
四元数的逆
q−1=∣∣q∣∣q∗
q−1⋅q=[1,0]
四元数乘法
四元数乘法
q1q2=[ω1v1][ω2v2]=[ω1ω2−v1⋅v2ω1v2+ω2v1+v1×v2]
四元数的结合律和交换律
(ab)c=a(bc)
ab=ba
四元数乘积的大小
∣∣q1q2∣∣=∣∣q1∣∣∣∣q2∣∣
四元数乘积的倒数
(q1⋯qn)−1=qn−1 ⋯q1−1
使用四元数乘法旋转三维矢量
- 设四元数 q 和三维向量 p;
- p 围绕 n^ 转换 θ
p′=qpq−1
四元数连接多个旋转
p′=(q1q2)p(q1q2)−1
四元数的差
四元数的差
- 给定方向 a 和 b;
- 计算 a 到 b 旋转的角位移 d;
da=b
d=ba−1
四元数点积
四元数点积
q1⋅q2=[ω1v1][ω2v2]=ω1ω2+v1⋅v2
四元数的对数, 指数和标量乘法
使用半角定义四元数
α=2θq=[cosαn^sinα]
四元数的对数
logq=log([cosαn^sinα])≡[0αn^]
四元数的指数函数
expp=exp([0αn^])=[cosαn^sinα]
四元数对数和指数的性质
exp(logq)=q
四元数乘以标量
kq=k[ωv]=[kωkv]
四元数指数
四元数指数
qt
最短弧
- 四元数使用最短弧表示角度位移;
- 若 q 为绕 x 轴顺时针旋转 30 度;
- q^8 并不是绕 x 轴顺时针旋转 240 度,而是 绕 x 轴逆时针旋转 120 度;
四元数取幂公式
qt=exp(tlogq)
四元数插值
理论上的四元数 Slerp 公式
slerp(q0,q1,t)=(q1q0−1)tq0
实际的四元数 Slerp 公式
slerp(q0,q1,t)=sinωsin(1−t)ωq0+sinωsintωq1
四元数的优缺点
- 平滑插值;
- 角位移的快速连接和逆;
- 矩阵形式的快速转换;
- 仅有四个数字;
- 存储空间略大于欧拉角;
- 可能无效;
- 人类难以使用;
四元数概要
四元数概要
- 四元数通过旋转轴和围绕旋转轴的量表示角位移;
- 四元数包括标量分量和向量分量;
- 三维的每个角位移具有两种不同的四元数表示,两者互为倒数;
- 表示无角度的四元数为单位四元数;
- 所有表示角位移的四元数都是单位四元数,大小为 1;
- 四元数的共轭表示相反的角位移;
- 四元数乘法可以链接多个旋转;
- 四元数取幂用于计算角位移的倍数,总是采用最短的弧;
表示方法之间的转换
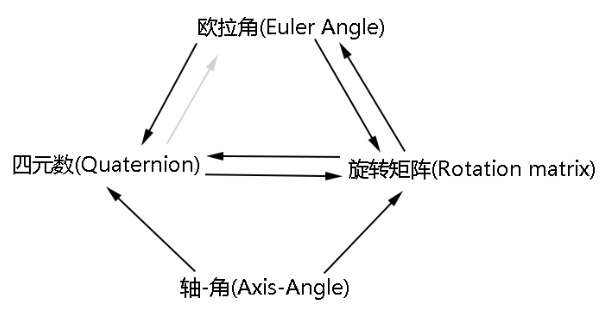
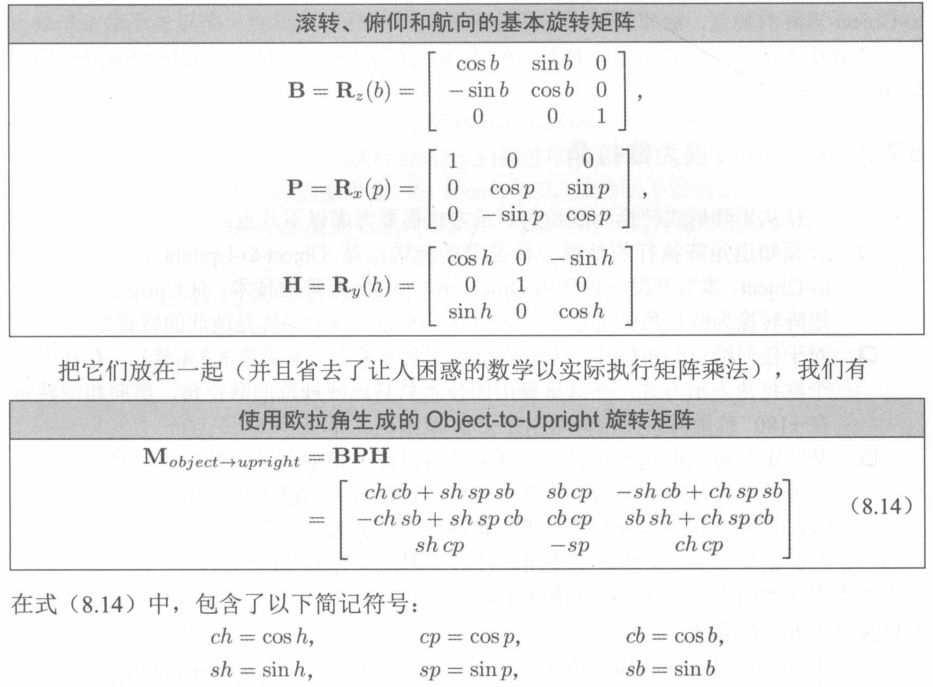
欧拉角和矩阵的转换
欧拉角转换为对象空间到直立空间的旋转矩阵
欧拉角转换为直立空间到对象空间的旋转矩阵
- 使用固定轴旋转;
- 对象空间到直立空间的转换的旋转矩阵的转置矩阵;
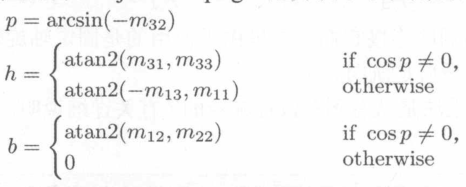
矩阵转换为欧拉角
p=arctan2(−m32)
h=arctan2(m31,m33)
b=arctan2(m12,m22)
四元数和矩阵的转换
四元数转换为矩阵
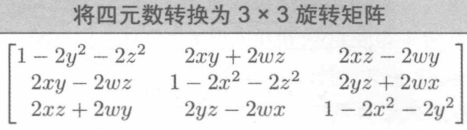
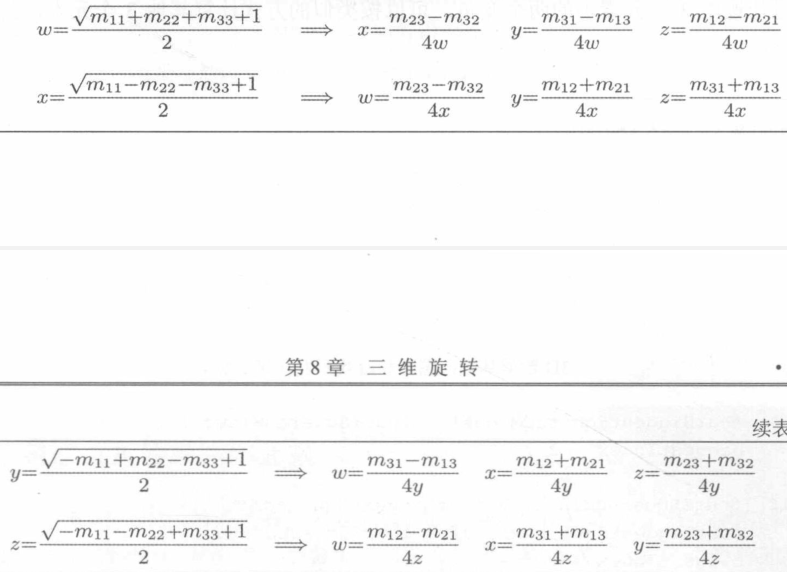
矩阵转换为四元数
欧拉角和四元数的转换
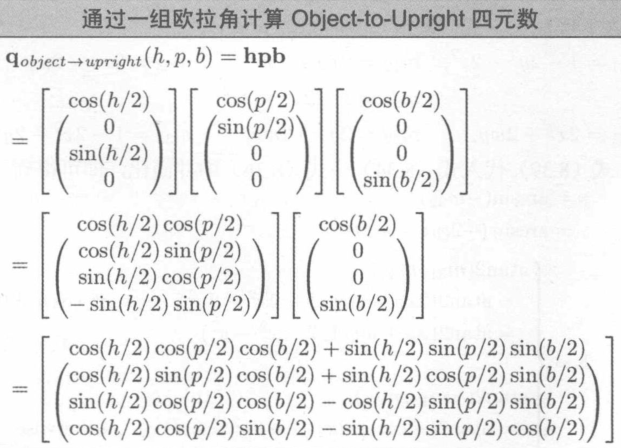
欧拉角转换为对象空间到直立空间的四元数
欧拉角转换为直立空间到对象空间的四元数
四元数转换为欧拉角