笛卡尔坐标系
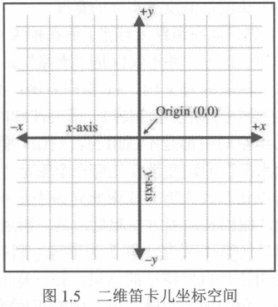
二维笛卡尔空间
二维笛卡尔坐标系
计算机屏幕坐标系

笛卡尔坐标
- (x,y) 分别指定 x 轴和 y 轴的投影位置;
三维笛卡尔空间
三维笛卡尔坐标空间
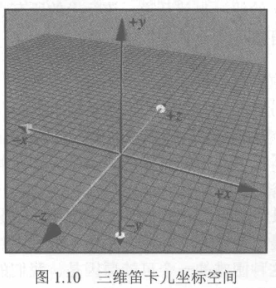
三维笛卡尔坐标
- (x,y,z) 分别指定 x 轴,y 轴和 z 轴的投影位置;
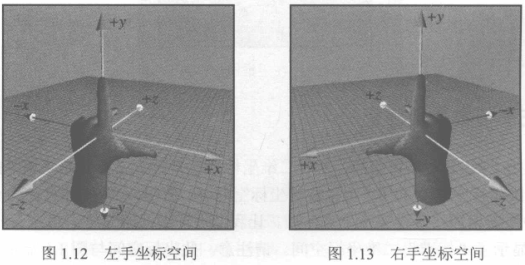
左手坐标系和右手坐标系
- 相同种类的坐标系可以通过旋转使轴对齐;
- 拇指,食指和中指分别指向 x,y,z;
左手规则和右手规则
- 规定旋转的正方向;
- 拇指指向旋转轴的正方向;
- 手指弯曲方向即正方向;
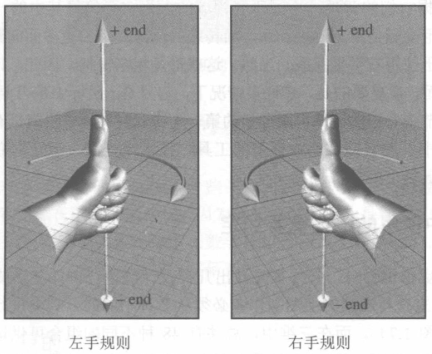
基本约定
- 使用左手坐标系和左手规则;
其他
求和和求积的表示法
求和表示法
求积表示法
区间符号
区间符号
角度, 度数和弧度
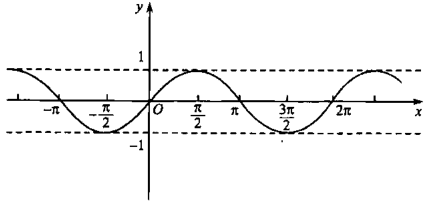
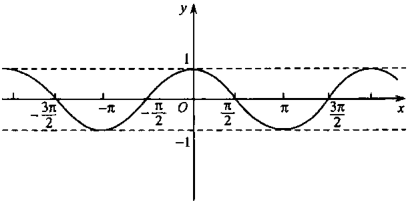
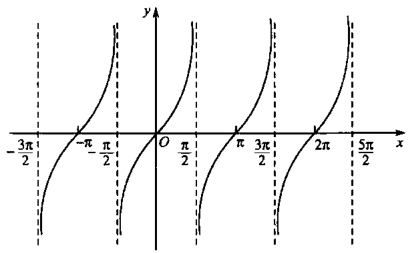
三角函数
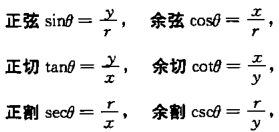
三角函数定义
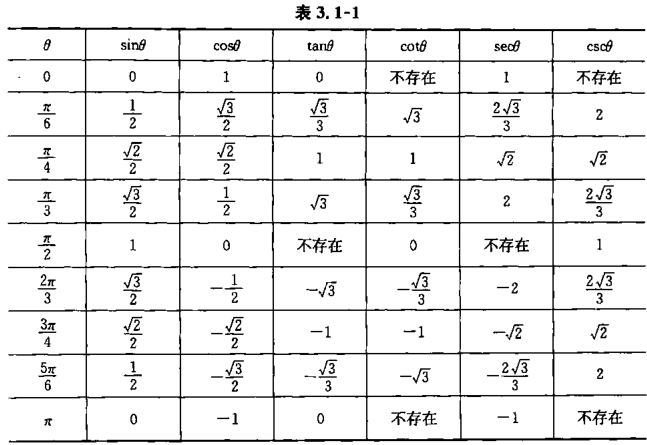
三角函数特殊值
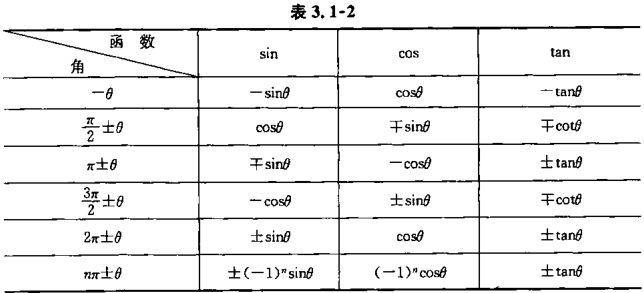
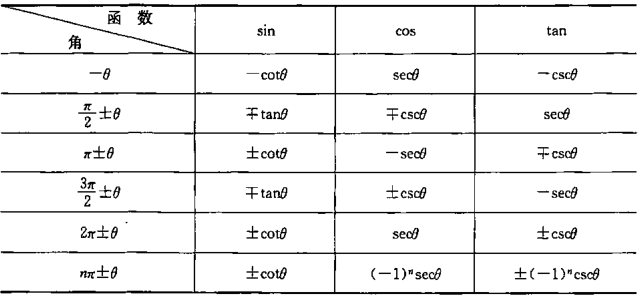
任意三角函数诱导公式
- 通用解法:奇变偶不变,符号看象限;
- 奇变偶不变;
- 当 k 为偶数是,三角函数符号不变;
- 当 k 为奇数是,三角函数符号翻转对应形式;
- 符号看象限;
- 计算 对应角度所在象限;
- 三角函数的正负号即原三角函数符号对应的角度在该象限的正负值;
sin
cos
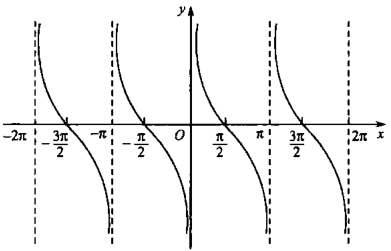
tan
cot
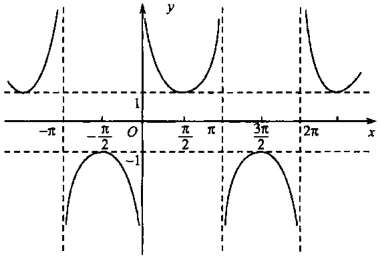
sec
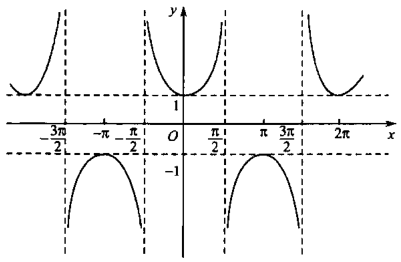
csc
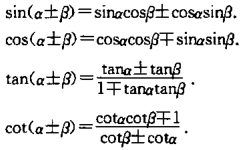
两角和公式
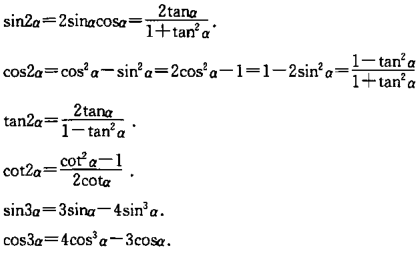
倍角公式
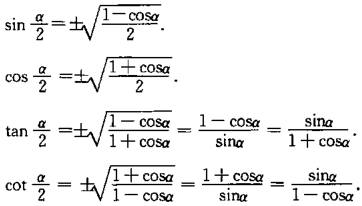
半角公式
和差化积

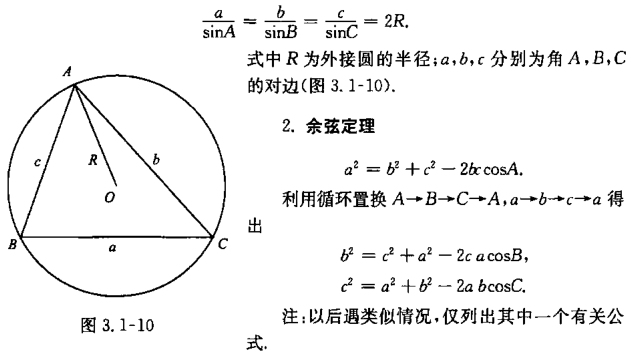
正弦定理和余弦定理