为什么需要多个坐标空间
- 某些信息仅在特定坐标系中是已知的;
- 例如一个点 a,我们可能不知道其在世界坐标系中的位置;
- 但我们或许表达 a 相对于其他坐标系的位置;
有用的坐标空间
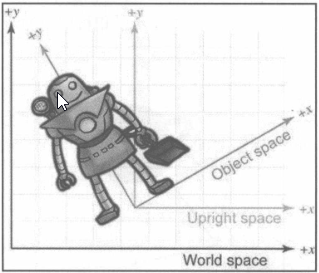
世界空间(全局坐标空间/通用坐标空间)
对象空间(体空间)
- 与特定对象关联的坐标空间;
- 每个对象都有自己独立的对象空间;
相机空间
- 与用于渲染的视点相关联的对象空间;
- 使用左手坐标系;
- 原点为相机;
直立空间
- 世界空间和对象空间转换的中间坐标空间;
- 直立空间轴线与世界空间平行;
- 直立空间原点和对象空间原点重合;
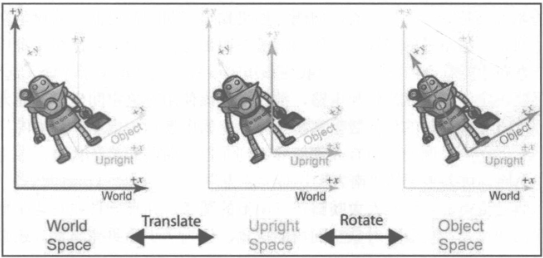
直立空间的转换
- 对象空间 - 直立空间:旋转;
- 直立空间 - 世界空间:平移;
基向量和坐标空间转换
基向量
- p,q,r 是三维空间的基向量;
- v 为基向量的线性组合;
- 世界空间的基向量一般为 [1,0,0],[0,1,0],[0,0,1]
v=xp+yq+zr
良好的基向量
- 一般选择相互垂直的基向量;
- Span(p,q,r) 线性无关;
正交基
标准正交基
转换公式
- 已知对象空间在直立空间表示的标准正交基为 p,q,r;
- u 为直立空间中的坐标;
- b 为对象空间的坐标;
ux=bpuy=bquz=br