矩阵的数学定义
矩阵维度和表示法
矩阵维度
- 具有 r 行 c 列的矩阵;
- 称作 r×c;
表示法
m11m21m31m12m22m32m13m23m33
方形矩阵
方形矩阵
对角元素
对角矩阵
100000003
单位矩阵
100010001
作为矩阵的向量
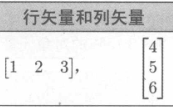
行向量和列向量
- 行向量:1×n;
- 列向量:n×1;
矩阵转置
矩阵转置
- r×c 矩阵 M;
- 其转置矩阵 c×r,MT 即 M 行列翻转;
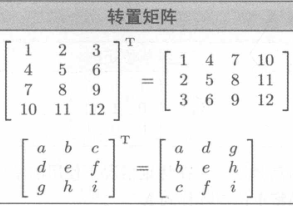
- (MT)T=M;
- 对角矩阵 D,DT=D;
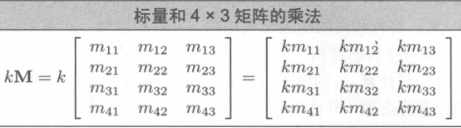
矩阵和标量相乘
矩阵和标量相乘
矩阵相乘
矩阵相乘
- r×n 矩阵 A 可与 n×c 矩阵 B 相乘;
- 结果为 r×c 矩阵 C;
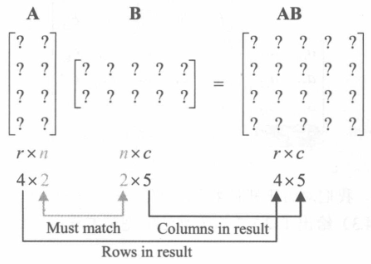
计算公式
- 对于 C 中的第 i 行,第 j 列的元素;
- 对应 A 中的第 i 行,B 中的第 j 列;
- A 和 B 的行和列的对应元素相乘求和;
cij=∑k=1naikbkj
- MI = IM = M;
- AB=BA;
- (AB)C = A(BC);
- (kA)B = k(AB) = A(kB);
- (AB)T=BTAT
向量和矩阵相乘
向量和矩阵相乘
- 行向量位于左侧,结果为行向量;
- 列向量位于右侧,结果为列向量;

矩阵的几何解释
矩阵的几何解释
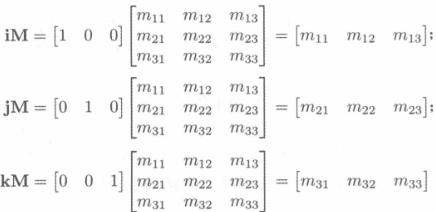
- 矩阵表示空间坐标变换;
- 矩阵的行可解释为坐标空间的基向量;
- 向量乘矩阵从一个坐标空间变换为另一个坐标空间;
- 对于标准基向量,标准基向量乘矩阵即经过矩阵变换后的坐标空间的基向量;
- p,q,r 表示一组基向量;

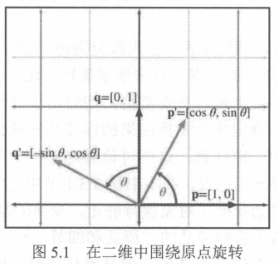
矩阵变换
二维旋转矩阵
[cosθ−sinθsinθcosθ]
围绕 x 轴的三维旋转
1000cosθ−sinθ0sinθcosθ
围绕 y 轴的三维旋转
cosθ0sinθ010sinθ0cosθ
围绕 z 轴的三维旋转
cosθ−sinθ0sinθcosθ0001
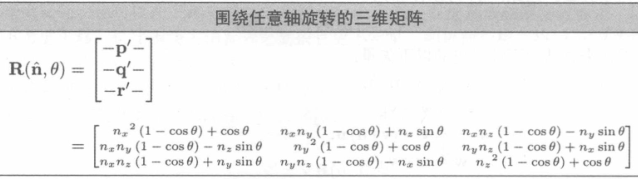
围绕任意轴的三维旋转
k 因子
- k < 1:缩小;
- k = 1:不变;
- k > 1:拉伸;
- k = 0:正交投影;

沿主轴缩放的二维矩阵
[kx00ky]
沿主轴缩放的三维矩阵
kx000ky000kz
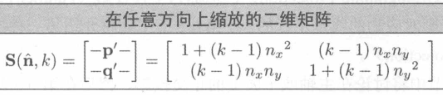
任意方向缩放的二维矩阵
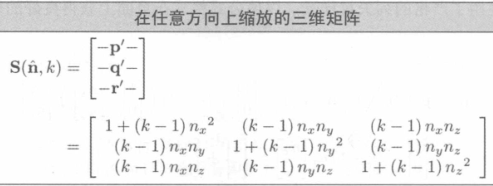
任意方向缩放的三维矩阵
正交投影
投影到 x 轴
[1000]
投影到 y 轴
[0001]
投影到 xy 平面
100010000
投影到 yz 平面
000010001
投影到 zx 平面
100000001
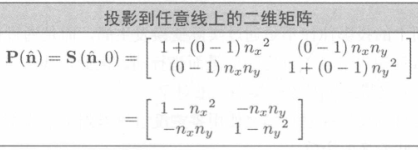
投影到任意线的二维矩阵
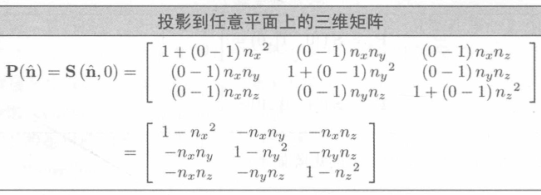
投影到任意平面的三维矩阵
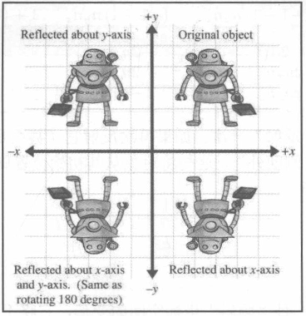
反射和缩放
- 当缩放矩阵的 k 值 为 -1 时;
- 即对对应轴进行反射;
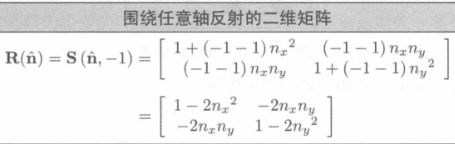
任意轴反射的二维矩阵
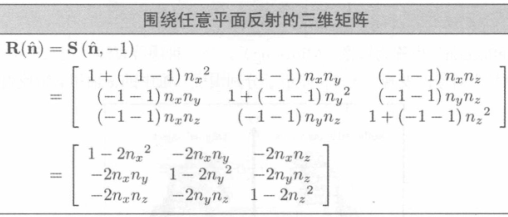
任意平面反射的三维矩阵
x 的二维错切矩阵
[1s01]
y 的二维错切矩阵
[10s1]
三维错切矩阵
Hxy=10s01t001
Hyz=100s10t01
Hzx=1s00100t1
组合变换
组合变换
变换的分类
线性函数
F(a+b)=F(a)+F(b)
F(ka)=kF(a)
线性变换
F(a+b)=(a+b)M=aM+bM=F(a)+F(b)
F(ka)=(ka)M=k(aM)=kF(a)
仿射变换
v′=vM+b
可逆变换
F−1(F(a))=F(F−1(a))=a
保持角度的变换
正交变换
- 保留长度,角度,面积和体积的大小的变换;
- 所有的正交变换都是仿射和可逆的;
刚体变换
- 不改变其形状的变换;
- 所有的刚体变换都是正交的,保持角度的;
矩阵的行列式
二维矩阵和三维矩阵的行列式
二维矩阵的行列式
∣M∣=[10s1]=m11m22−m12m21
三维矩阵的行列式
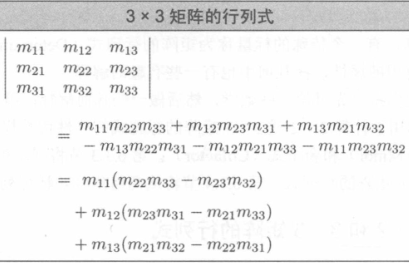
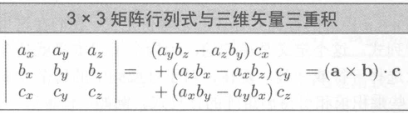
三维矩阵行列式与三维矢量三重积
子矩阵行列式和余子式
子矩阵行列式
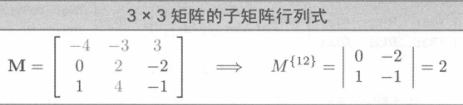
矩阵的余子式
Cij=(−1)i+jMij

任意维度矩阵的行列式
任意维度矩阵的行列式
∣M∣=∑j=1nmijCij=∑j=1nmij(−1)i+jMij
行列式的重要特性
单位矩阵的行列式
∣I∣=1
矩阵乘积的行列式
∣AB∣=∣A∣∣B∣
转置矩阵的行列式
∣MT∣=∣M∣
行或列全为 0 的矩阵
交换行或列
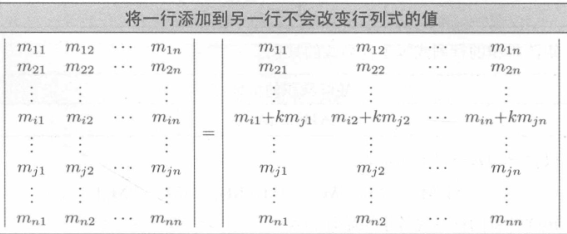
某行添加到另一行
行列式的几何解释
二维矩阵
三维矩阵
逆矩阵
M(M−1)=M−1M=I
经典伴随矩阵
经典伴随矩阵
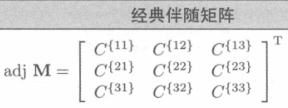
逆矩阵
计算公式
M−1=∣M∣adjM
重要特性
- 矩阵的逆矩阵的逆矩阵是原始矩阵;
- 单位矩阵的逆矩阵是自己;
- 矩阵转置的逆矩阵是逆矩阵的转置;
- 矩阵乘积的逆等于矩阵的逆的乘积;
- 逆矩阵的行列式是原始矩阵行列式的倒数;
(M−1)−1=M
I−1=I
(MT)−1=(M−1)T
(AB)−1=B−1A−1
∣M−1∣=∣M∣1
逆矩阵的几何解释
逆矩阵的几何解释
正交矩阵
正交矩阵
正交矩阵
MMT=I
MT=M−1
正交矩阵的几何解释
正交矩阵的解释
- 矩阵每行为单位向量;
- 矩阵的行相互垂直;
- 即标准正交基;
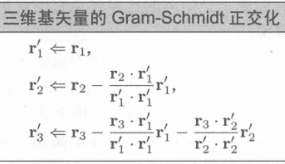
矩阵的正交化
Gram-Schmidt 正交化
4*4 齐次矩阵
四维齐次空间
二维齐次坐标
- (x,y,w);
- (x,y) 用齐次坐标表示为 (x,y,1);
- (x,y,w) 映射到 (x/w,y/w);
三维齐次坐标
- (x,y,z,w);
- (x,y,z) 用齐次坐标表示为 (x,y,z,1);
- (x,y,z,w) 映射到 (x/w,y/w,z/w);
- 当 w = 0 时称为无限远的点;
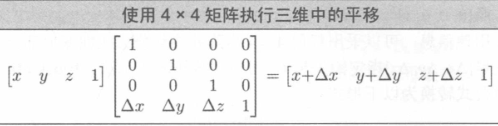
平移矩阵
三维变换矩阵拓展至四维
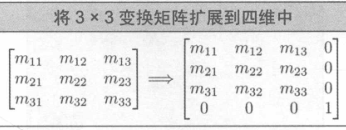
平移矩阵
一般仿射变换
一般仿射变换
- 首先经过平移矩阵平移到原点;
- 在原点执行三维变换矩阵;
- 通过平移矩阵的逆矩阵返回值原来位置;
TR(T−1)
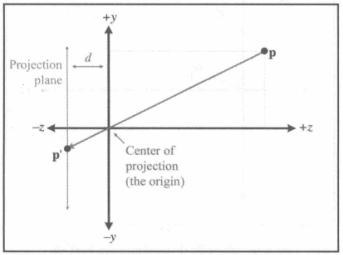
针孔相机
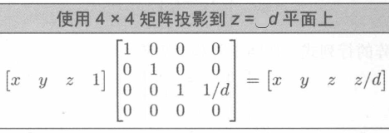
投影到 z = -d 平面

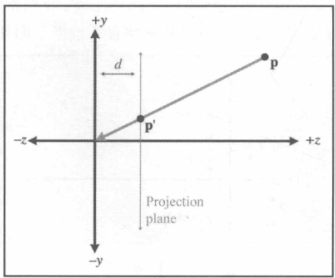
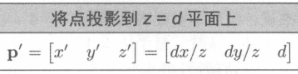
投影到 z = d 平面
投影透视矩阵
投影透视矩阵